
ミルクパックロボ
以前子供達がマイコンを使って動くロボットを作りました。

このロボットを誰でも作りやすく、小学生の自由研究の工作感覚で作れるようにしたものを開発しています。

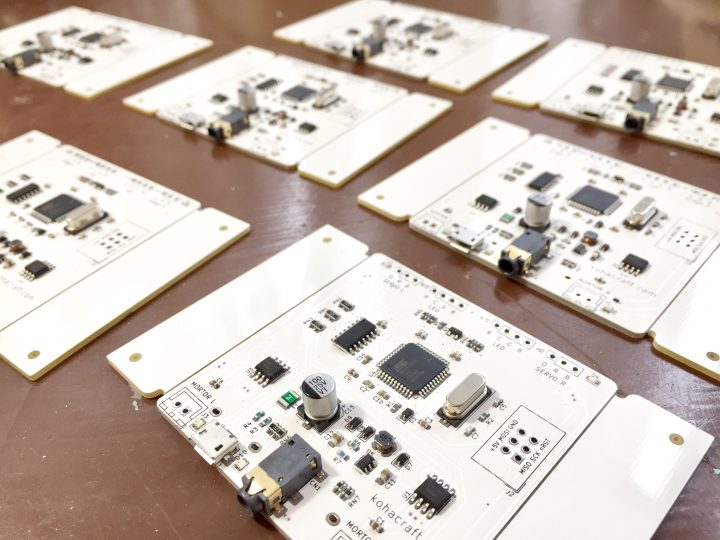
試作がうまくいって、発注していた基板が到着したので、早速実装していきたいと思います。
2019.7.23 追加
この記事のロボットはこちらで購入いただけます。

追加終わり
リモコンの実装
基板は、リモコンと本体基板の2つに別れています。まずはリモコンの部品実装をしていきます。
ハンダを印刷

形状が肉まん型なので、捨て基板をつけて製造することができなかったので、動かないように、3方を捨て基板で挟みます。

ステンシルを位置決めして、テープで固定します。

ハンダペーストをよーくよーく撹拌します。綺麗にハンダペーストを印刷するためには、よく撹拌して滑らかにしておく必要があります。とても重要な工程です。

マルツパーツの会員カード(である必要はない)のスキージでハンダペーストを印刷していきます。1cmを1秒くらいのスピードで手前にずらしていきます。
部品の実装

逆作用ピンセットを使って部品を載せていきます。リモコンなので部品が少なめ。比較的短時間に実装ができました。
リモコンと、本体基板とはステレオオーディオケーブルで接続しようと思います。普通のケーブルにコネクタをつけると結構高価なので、汎用的なケーブルを採用しました。そのため、ステレオミニプラグのジャックが載っています。

リフローして、2つくっついた基板を分離。ヤスリで仕上げれば、リモコンの完成です。
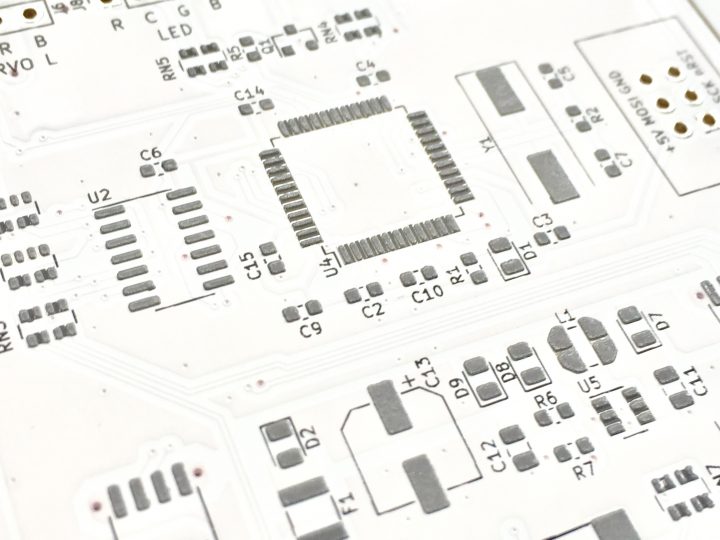
本体基板の実装
ハンダの印刷

この基板は以前紹介した、画鋲で基板とステンシルの位置極めする技を使って、ハンダペーストを印刷します。


2枚重ねのダンボールの中央に基板を置きます。奥と手前に捨て基板を配置して、対象の基板を挟みます。捨て基板はテープでダンボールと固定します。

基板に開けておいた穴と、ステンシルい開けておいた穴を使って、ステンシルと基板とを画鋲で固定します。これで、ステンシルと基板の位置決めが完了します。超絶便利ですよ。
ハンダペーストをよく撹拌します。

ステンシルの奥にハンダペーストを載せます。

マルツパーツの会員カード(でなくてもいいですよ)のスキージで、ゆっくりハンダペーストを印刷していきます。
画鋲のおかげて、全くずれず、正確な位置にハンダペーストが印刷できます。

何枚印刷しても、画鋲で位置極めするおかげて、バッチリ正確な位置にハンダが印刷できます。とっても便利ですよ。
実装
面積の大きいICなどの部品はバキュームピック。

チップ部品は逆作用ピンセットを使って部品を載せていきます。

これらの道具は安くて実装効率が劇的に向上するので、ハンド実装している方は是非とも試してください。
リフロー

ホットプレートでリフローします。ホットプレートの金属板は熱伝導が悪く、ヒーターの埋まっている所とそれ以外の場所で、温度のムラができてしまいます。特にプレートの周辺は温度の上昇が遅く、中心部分が加熱し過ぎになってしまっている可能性があります。
そこで、円形のアルミプレートを作ってもらって敷いています。

この板のお陰で、均一にハンダペーストが溶けるようになりました。おすすめです。

捨て基板を、Vカットのラインで切り離します。前回のMAX10 FPGA基板の時は、FusionPCBのミスでVカットができていませんでしたが、今回は大丈夫。Vカットのお陰で簡単に捨て基板が切り離せました。
ブートローダーの書き込み

基板に搭載されているマイコンAtmega32U4にArduino Leonardoのブートローダを書き込みます。
今回、Aliexpressでとっても便利な物を見つけたので、これを使って書き込みます。

洗濯バサミのような物に、テスト用のピンが付いています。このピンは収縮性があって、基板のスルーホールにぴったり接触するようになっています。
この商品は、1列6ピンのピン配置なのですが、注文時にコメントで「I want to 2*3P ( double dow and 3 pins ) probe type. Can I get this type? 」と、2列3ピンをお願いした所、こころよく特注を引き受けてくれました。
これが注文時のやりとりです。

Leeさんは、6ピン1列のタイプを注文した時に、2*3pが欲しいとコメントを残してくれたら、そのように作ってあげるよ。と言ってくれています。途中間違えて1列3ピンタイプで注文していますが、注文し直して、2列3ピンタイプを作ってもらえました。
私が購入したのは、Aliexpressの「OPEN-SMART Official Store」というお店です。他のお店で対応してくれるかはわかりません。
届いたのがこちら。

これを、基板のISP端子の所にはさみます。

ブートローダーは最初に1回しか書き込まないので、わざわざコネクタを半田付けするの面倒ですよね。これを使うと、未実装のコネクタのスルーホールを使って、ブートローダーを書き込むことができます。とても便利ですよ。
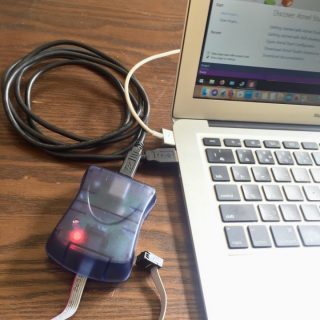
中華製AVR ISPクローンでブートローダーを書き込みました。中華製クローンはwindows10で認識させるのに手間がかかったり、コネクタが10ピンだったりしますが、なんとかなりますよ。
テストプログラムの書き込みとテスト

ブートローダーが書き込めたので、パソコンにつないでみます。Arduino Leonardoとして無事認識されました。
Arduino IDEからロボットのテストプログラムを書き込んでおきます。
残りの部品の半田付け

ピンヘッダ、コネクタ、電池ボックスを半田付けして、基板の完成です。

基板の裏側が電池ボックスになっています。
動作テスト

モーターとサーボ、LEDをつなぎます。リモコンと本体基板とを、オーディオケーブルで接続すると、電源が入る仕組みになっています。
リモコンを操作すると、元気よくモーターが回って、サーボが腕を降るように動きました。テストは大成功です。メイン基板、リモコン共に正常に動作することがわかりました。基板完成です!!
あとは、作り方のページを作って、商品化しまーす。
2019.7.23 つづき
このロボットキットはこちらで購入できます。





コメント